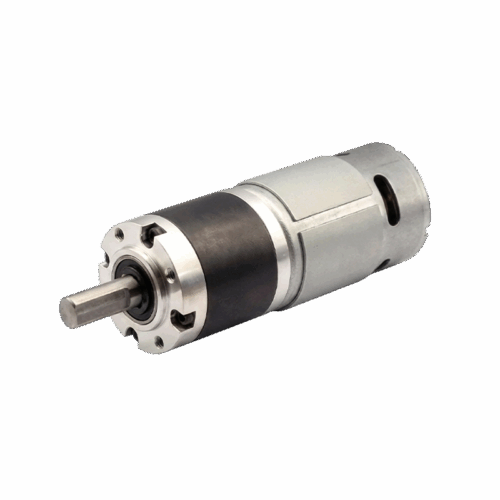


28mm Diameter 395 Brushed DC Motor
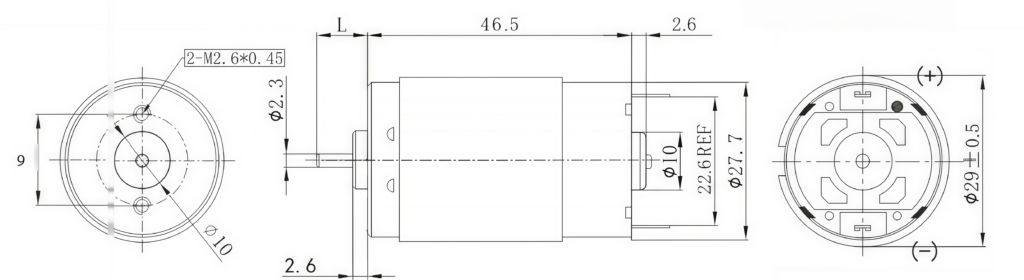
This 395 brushed DC motor targets compact high-load drives where you need strong burst torque and stable mid-speed output in a longer 27.7×46.5mm envelope across 3V–24V systems.















This 395 brushed DC motor targets compact high-load drives where you need strong burst torque and stable mid-speed output in a longer 27.7×46.5mm envelope across 3V–24V systems.





This model emphasizes higher torque capability in a compact diameter, suitable for mechanisms that demand stronger push force, higher inertia starts, or heavier friction loads than shorter can motors.

| Model | No Load | Max Efficiency | Max Output | Stall | |||||||
| Voltage (V) | Current (A) | Speed (rpm) | Current (A) | Speed (rpm) | Torque (g.cm) | Current (A) | Speed (rpm) | Torque (g.cm) | Current (A) | Torque (g.cm) | |
| SLW-R395-24100 | 12 | 0.137 | 9426 | 0.825 | 8082 | 84.6 | 2.551 | 4713 | 296.6 | 4.965 | 593.3 |
| SLW-R395-18120 | 24 | 0.06 | 6296 | 0.407 | 5483 | 123.9 | 1.402 | 3148 | 479.5 | 2.744 | 959 |
For additional customization or reference configurations, please feel free to contact us.



The 46.5mm length supports stronger output potential and better thermal margin than shorter motors of similar diameter, helpful for heavier loads and longer run times.

The 12V and 24V versions provide different speed and torque characteristics, supporting system-level design choices without changing motor class.
Max-efficiency torque is the more realistic reference for continuous load sizing, helping you avoid operating too close to stall during normal use.

Max-output torque supports short push events, while stall torque defines the upper boundary for jams, hard starts, and protection settings.
















If you share your available space and the driven load type, we can help narrow the most suitable configuration quickly.

English

Japanese

Korean

Tell us about your project or application, and our team will get back to you with technical support, product recommendations, or a customized motor solution.


