Specs
Key Features
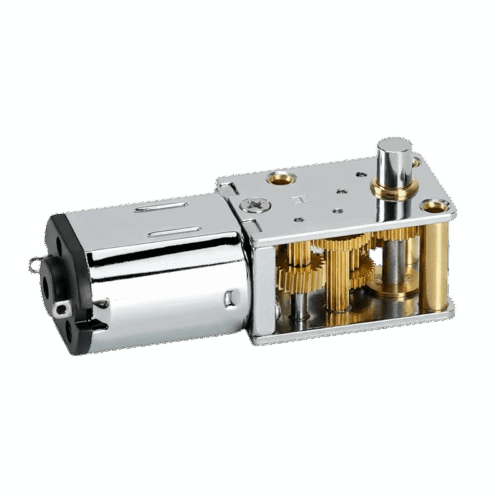
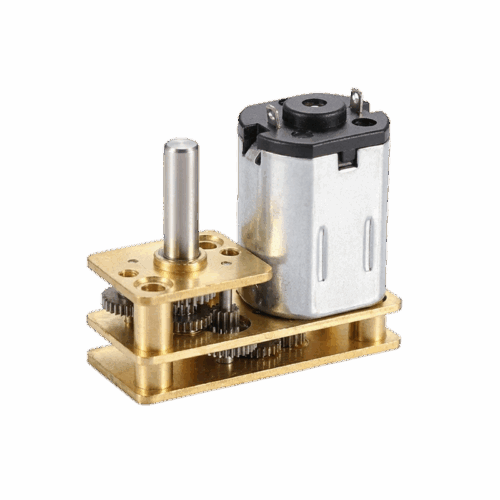
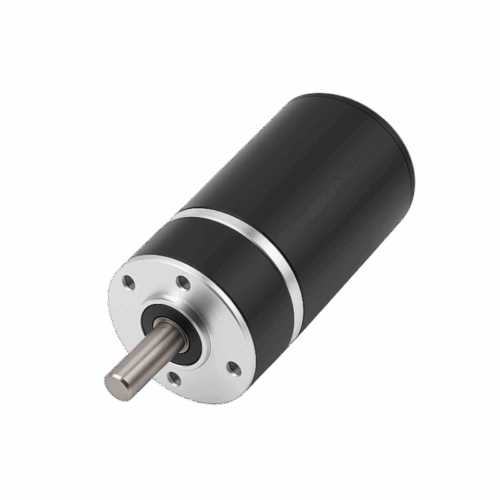
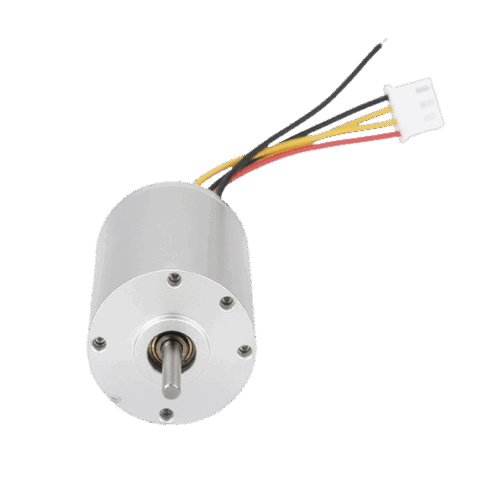
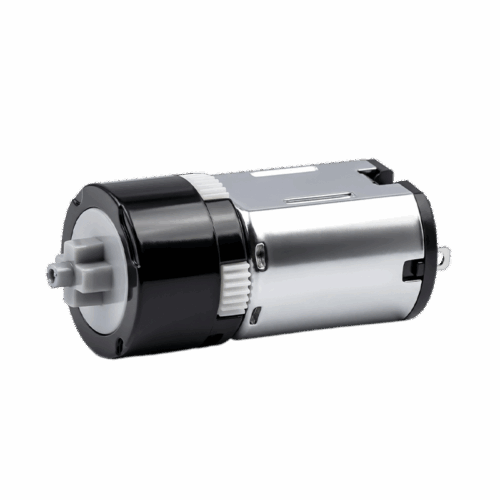
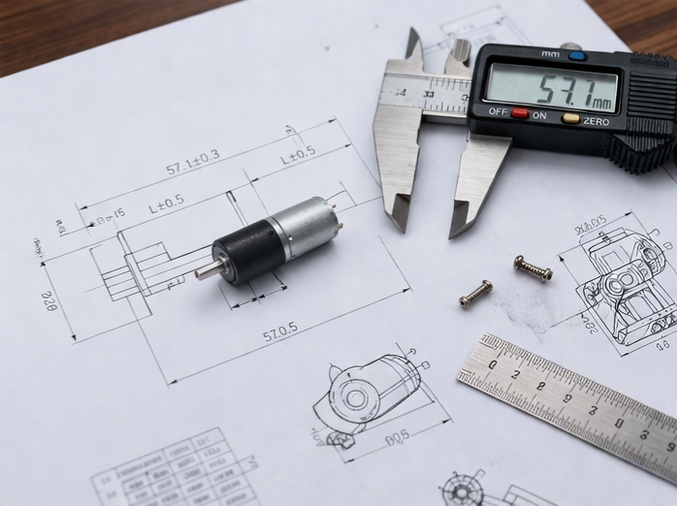
This model is a micro brushed coreless gear motor platform defined by its Φ10×L48 envelope, a low-speed rated operating point, and an integrated encoder interface that supports closed-loop motion in compact mechanisms.
- 3V–24V applied range supports low-voltage battery and regulated DC architectures
- 6V rated point provides a defined baseline for speed/current/torque planning in control loops
- No-load speed is listed as 210 r/min ±12%, helping you set expected free-run speed before loading the mechanism
- Rated speed is listed as 190 r/min ±12% with rated current 150 mA, supporting predictable driver sizing under working load
- Stall torque is listed as 1500.0 g.cm with stall current 1.2 A, separating normal control current from fault or jam events