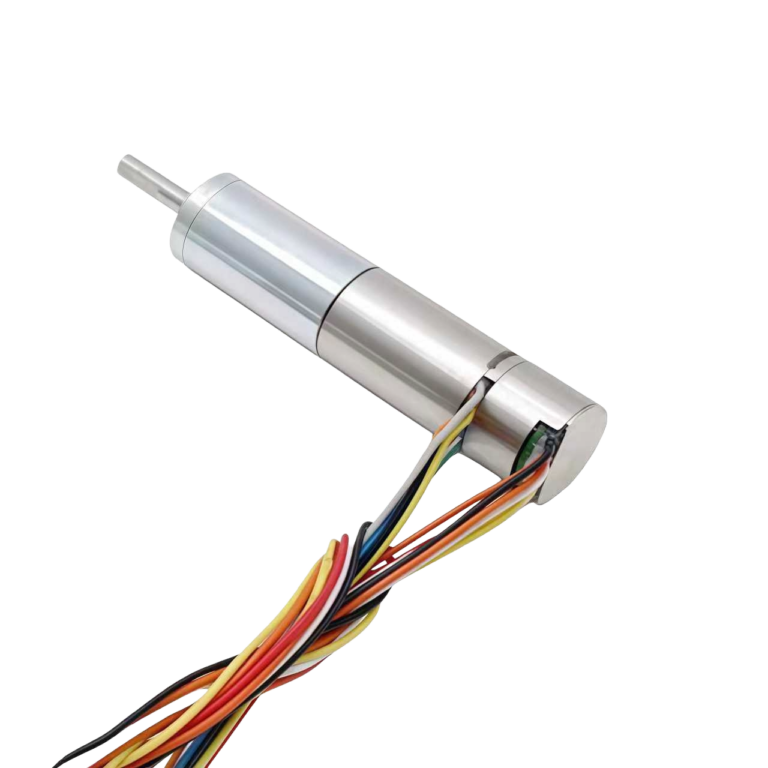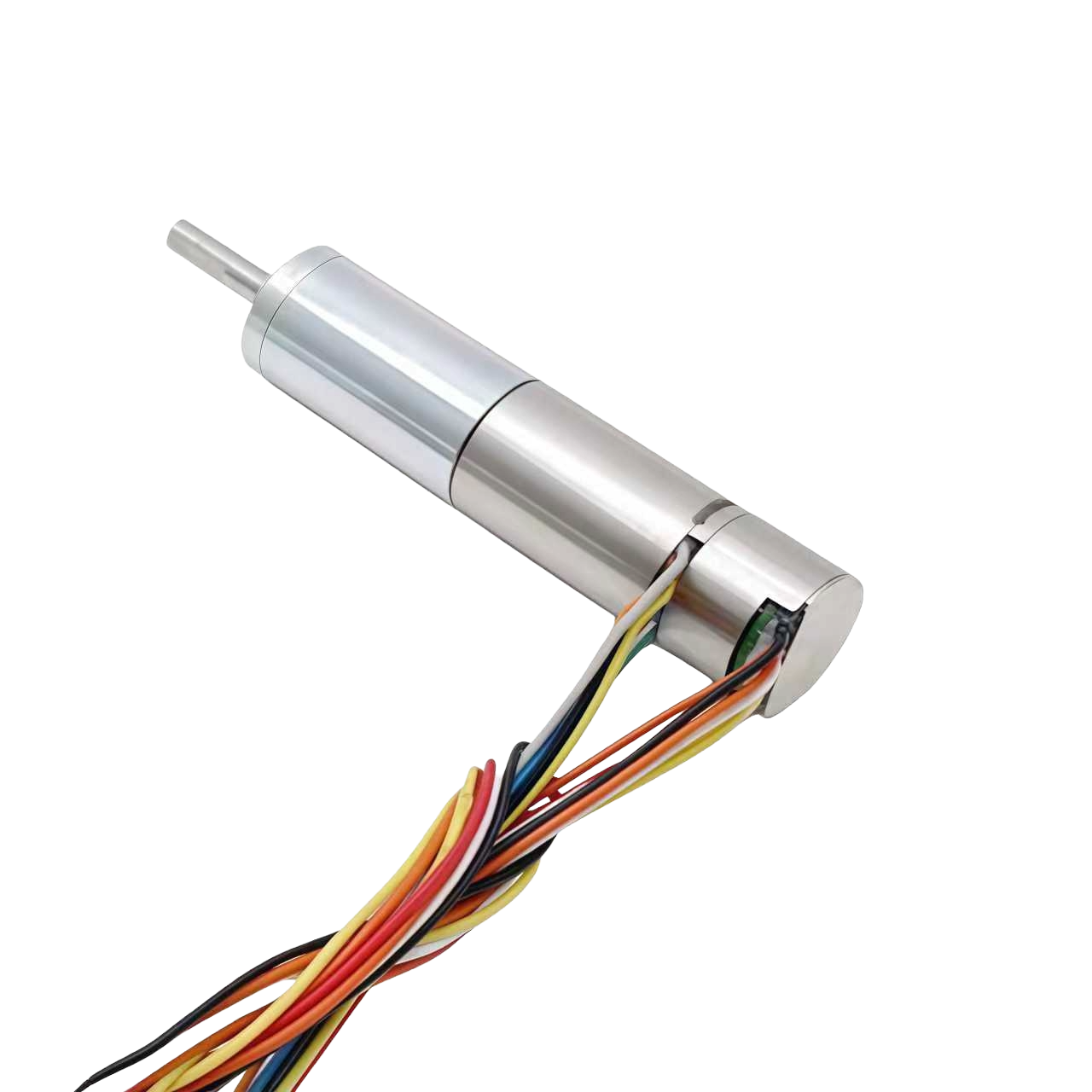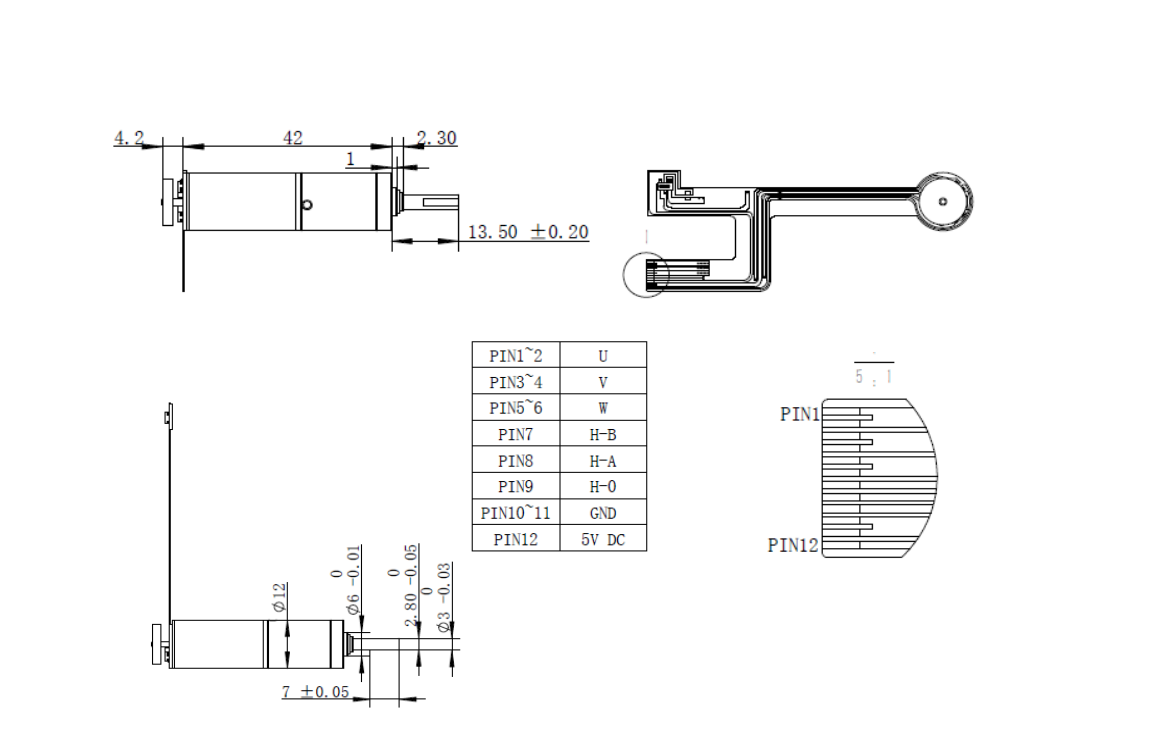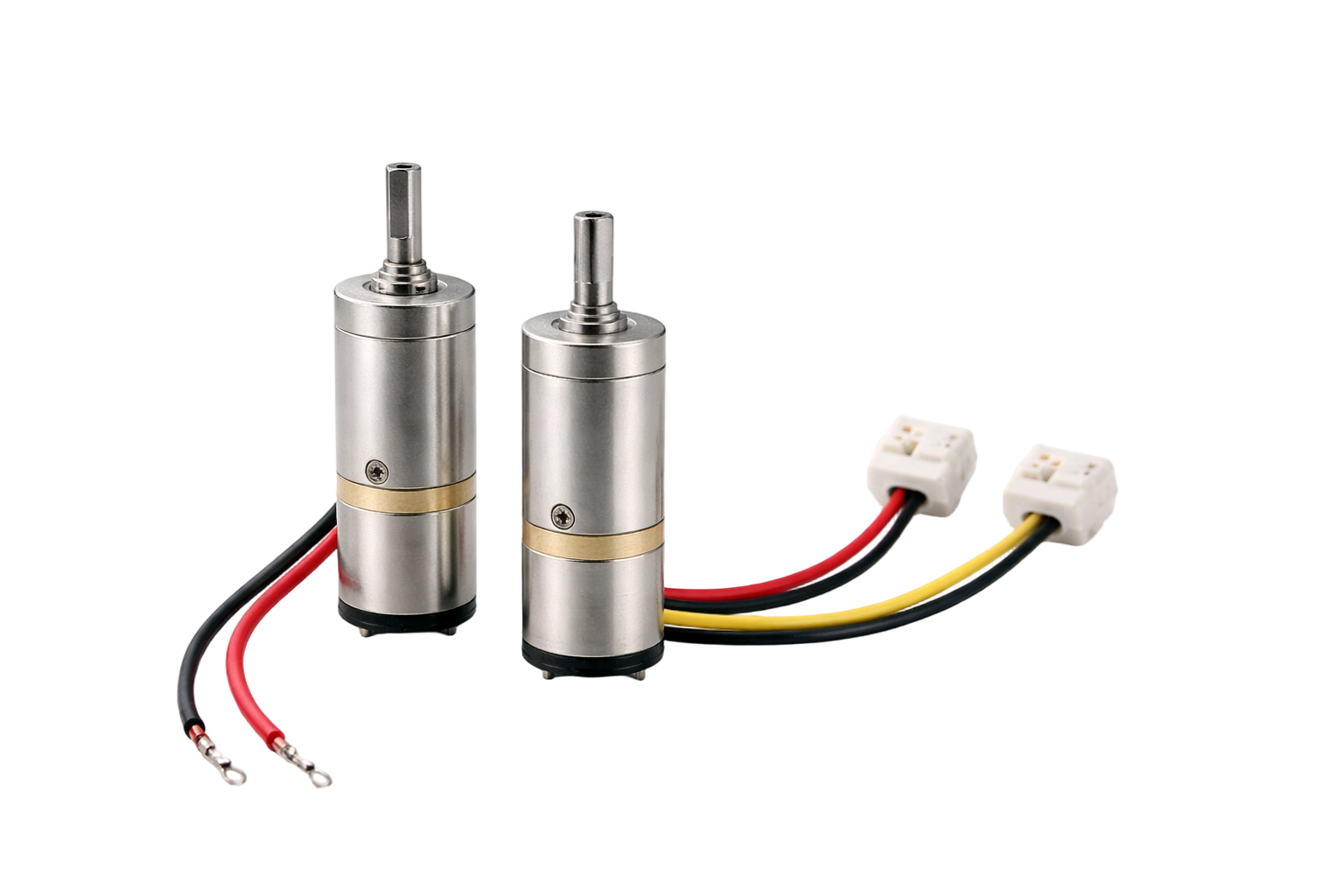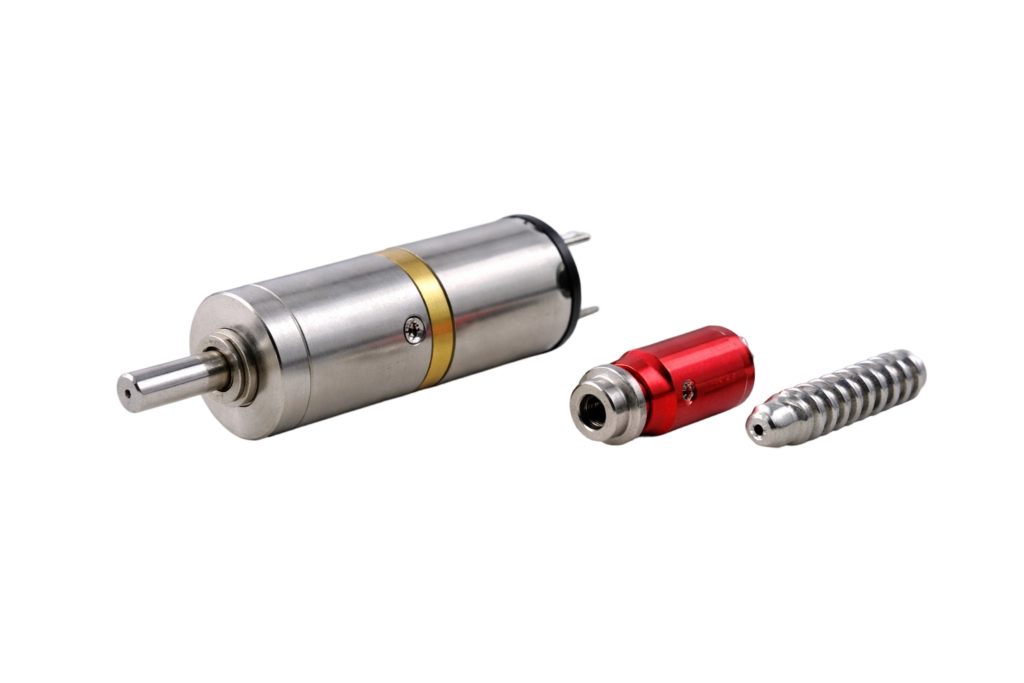
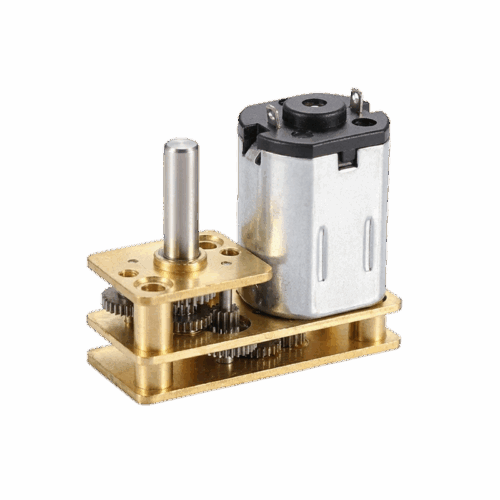
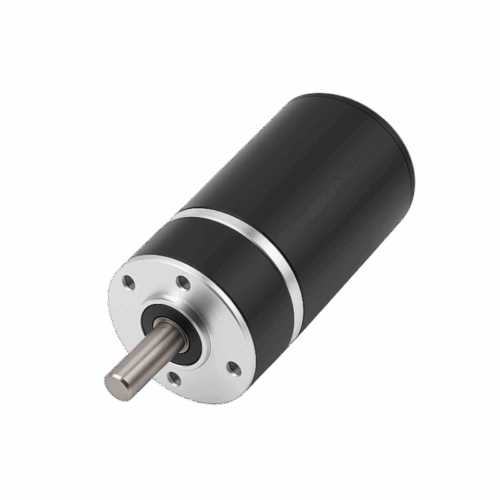
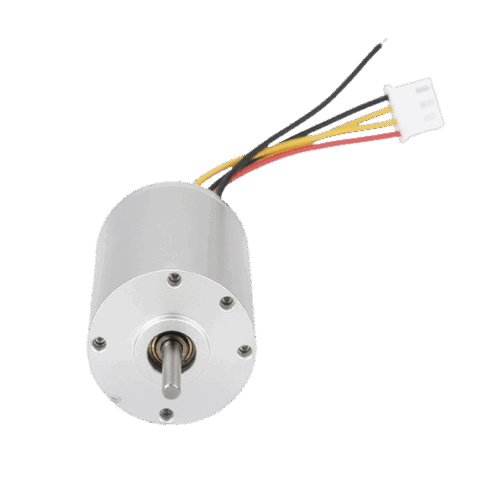
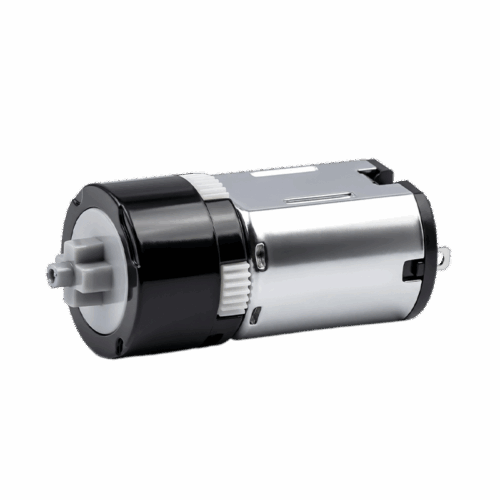
















12mm Diameter DC Brushless Coreless Motor With Planetary Gearbox And Encoder
This 12mm brushless coreless motor integrates a planetary gearbox and encoder for compact closed-loop motion, covering 3V–24V systems that need controllable speed and repeatable positioning in tight space.