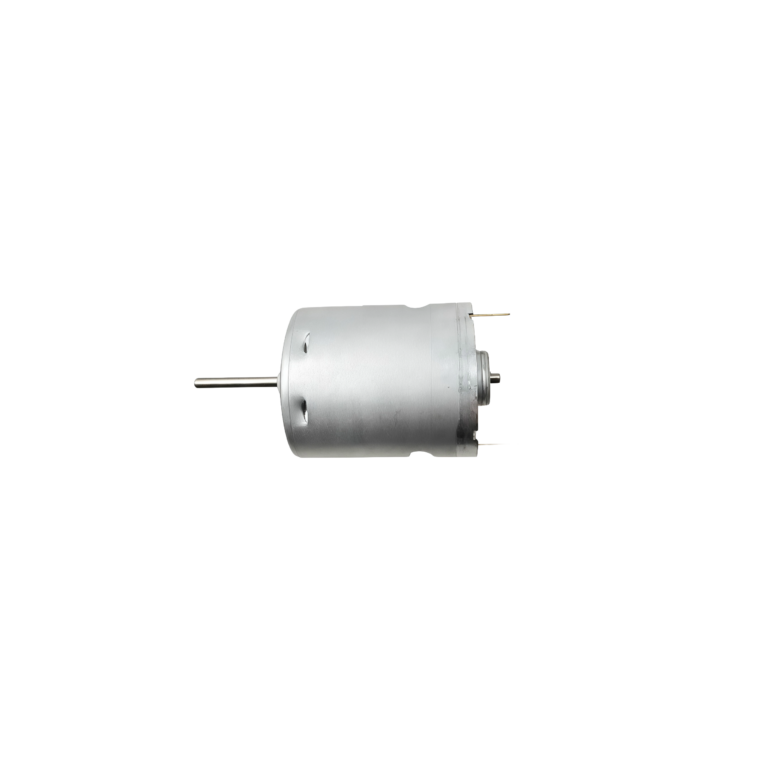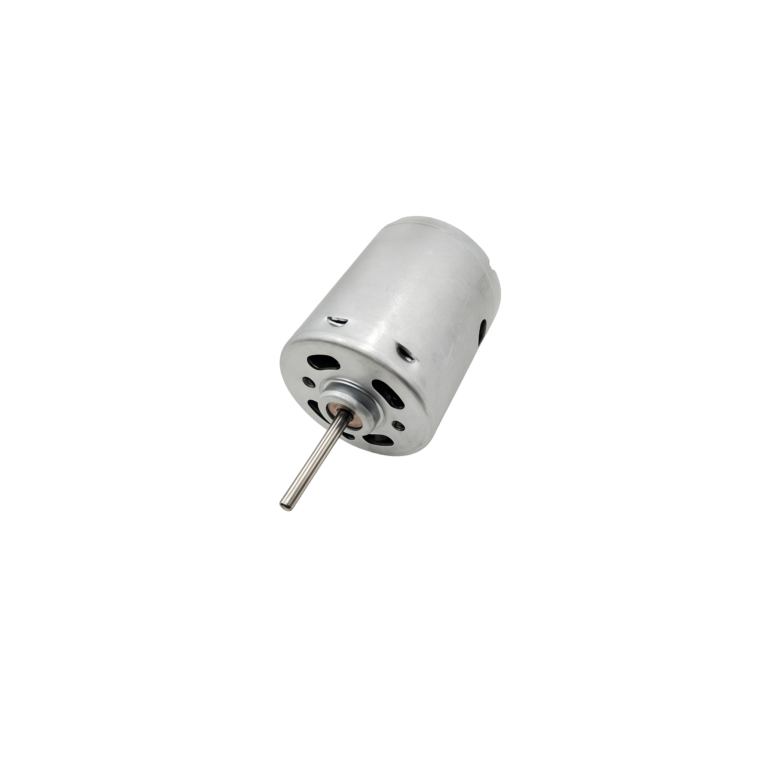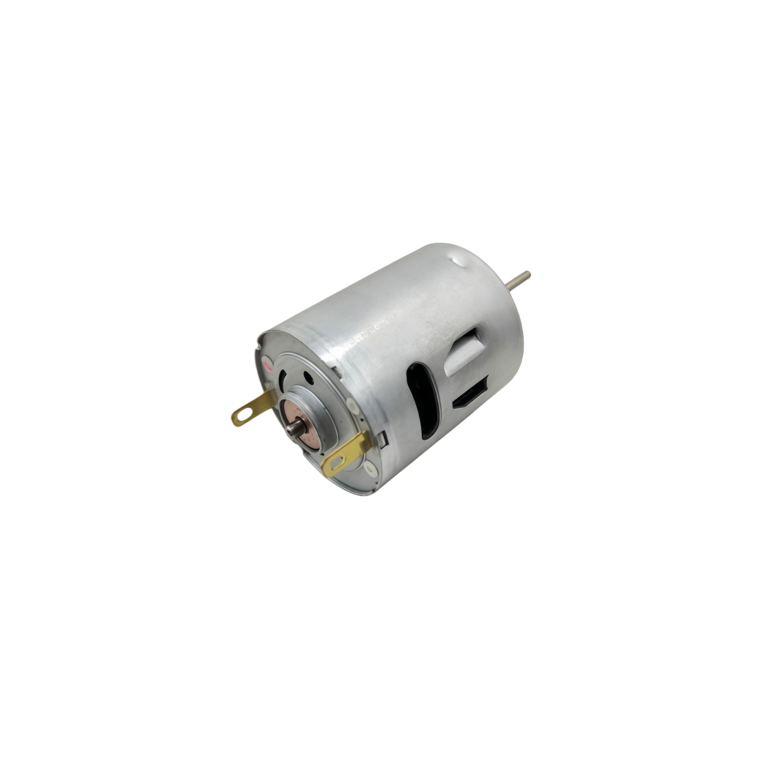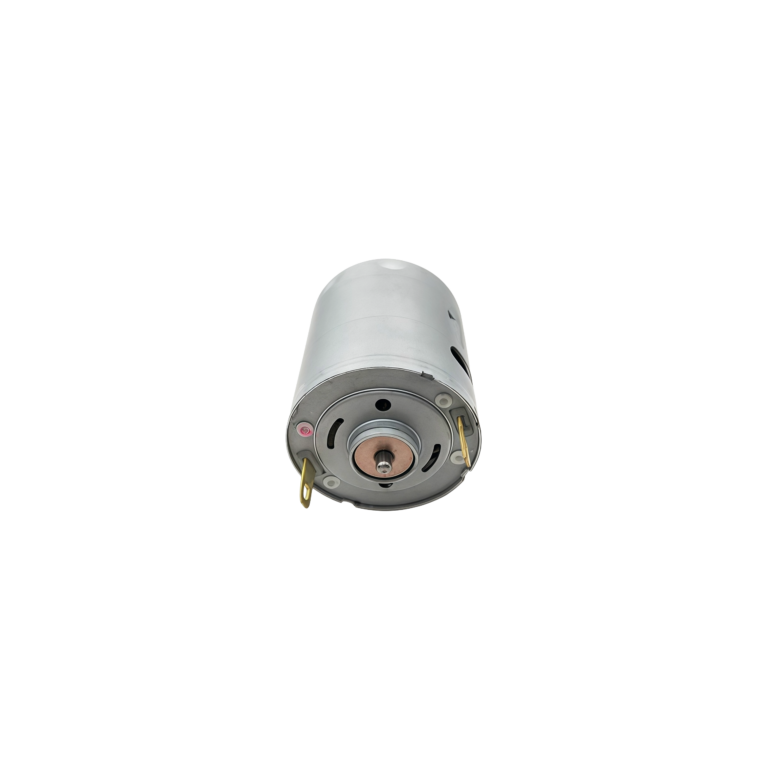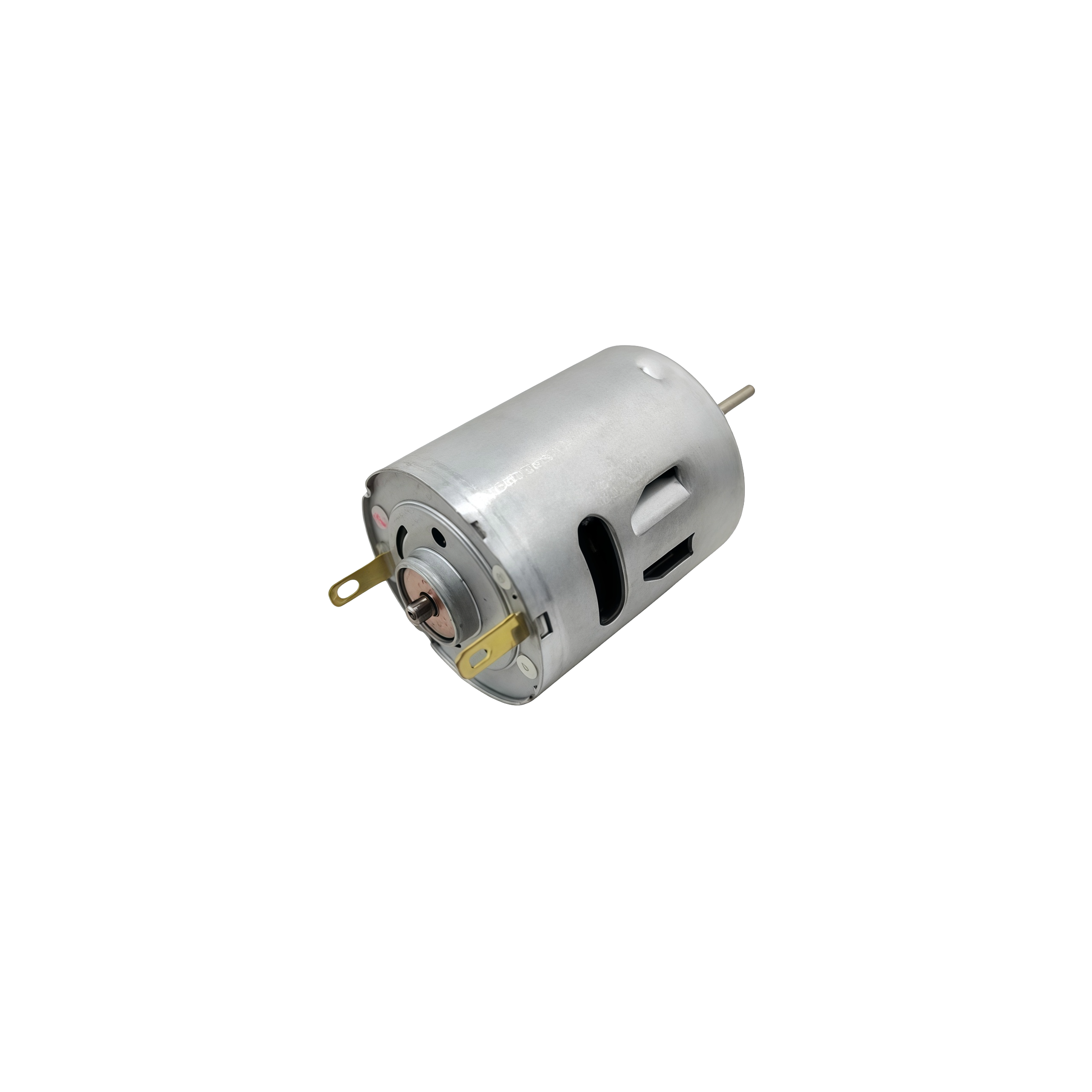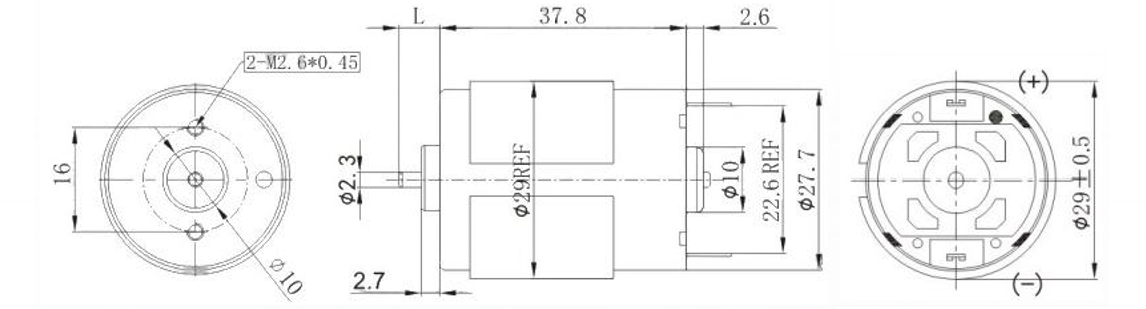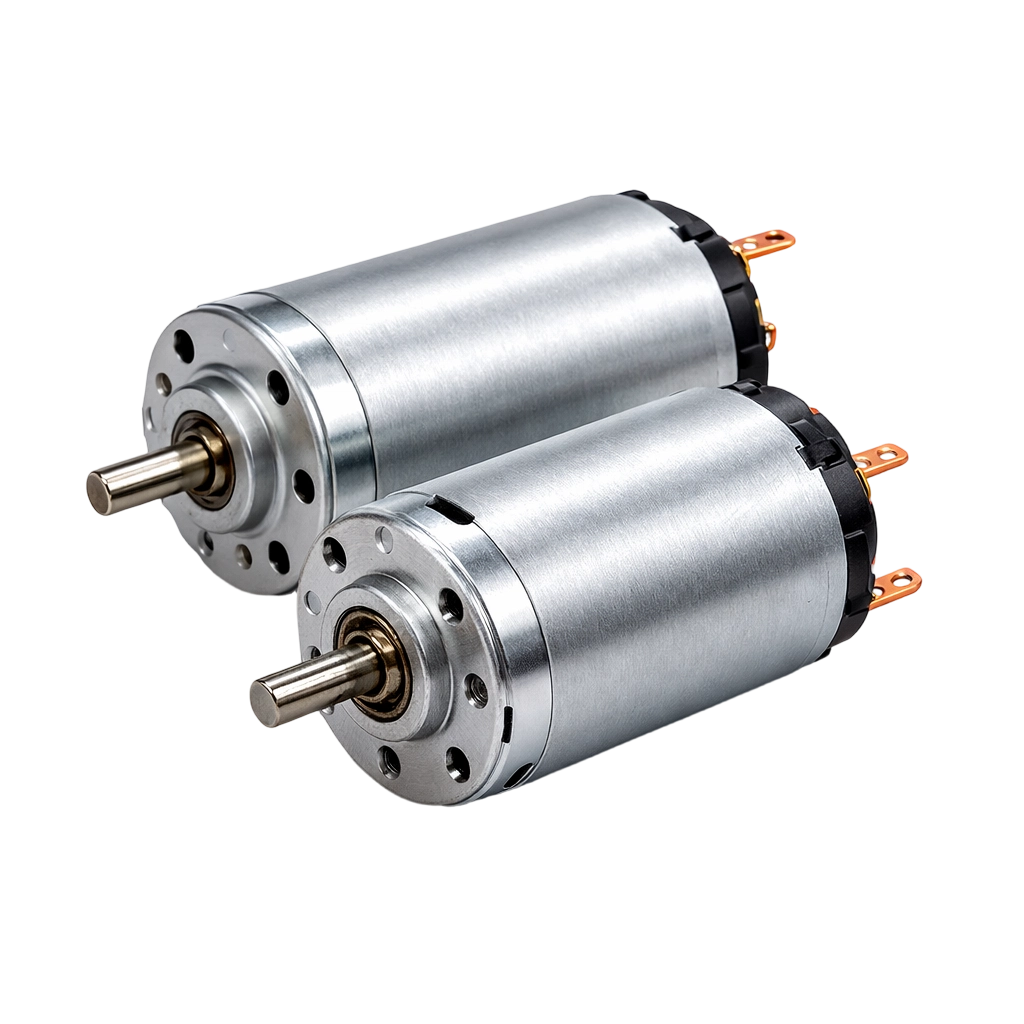
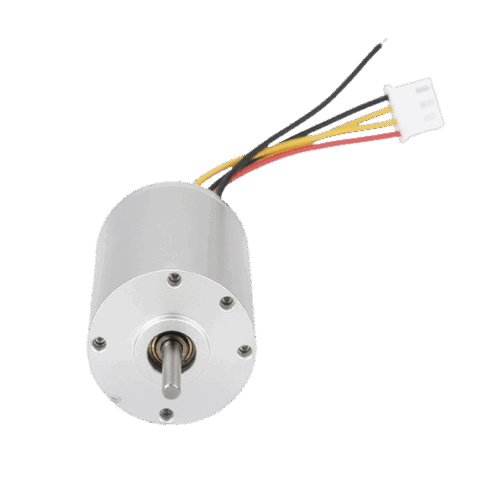
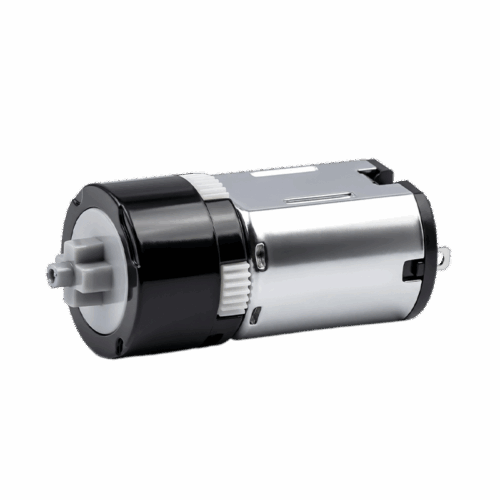
















28mm Diameter 385 Brushed DC Motor
This 385 brushed DC motor is designed for 3–24V systems where you select between 6V and 24V windings, then size your driver and mechanics using a full curve table from no-load through max efficiency, max output, and stall.