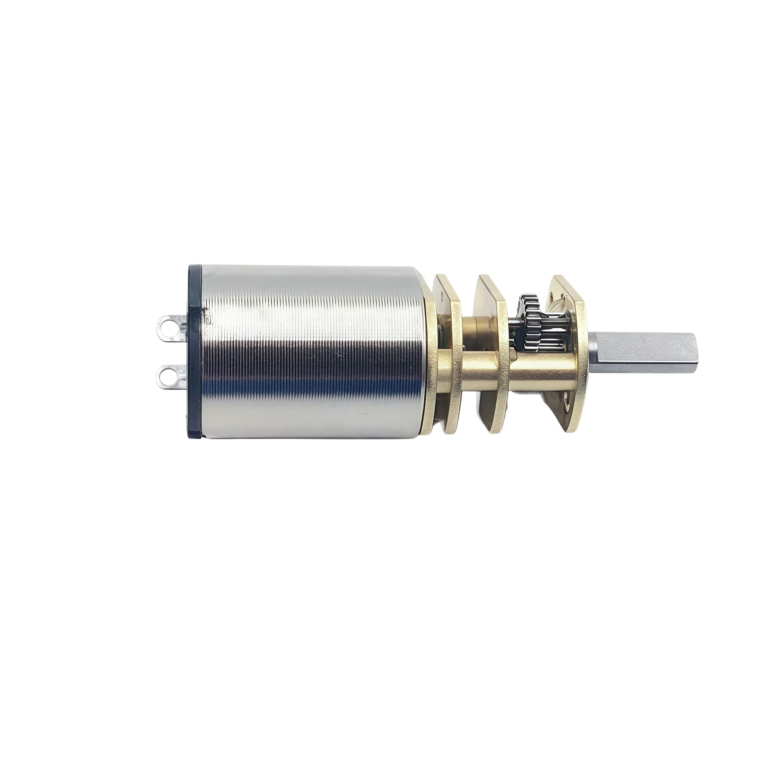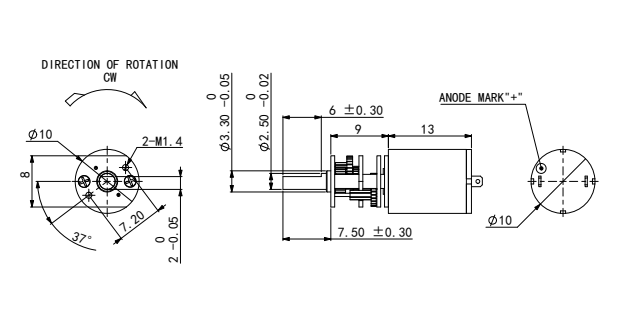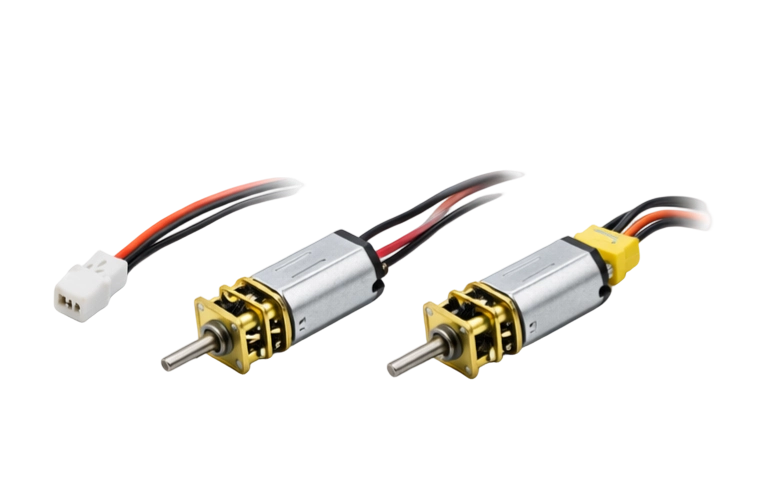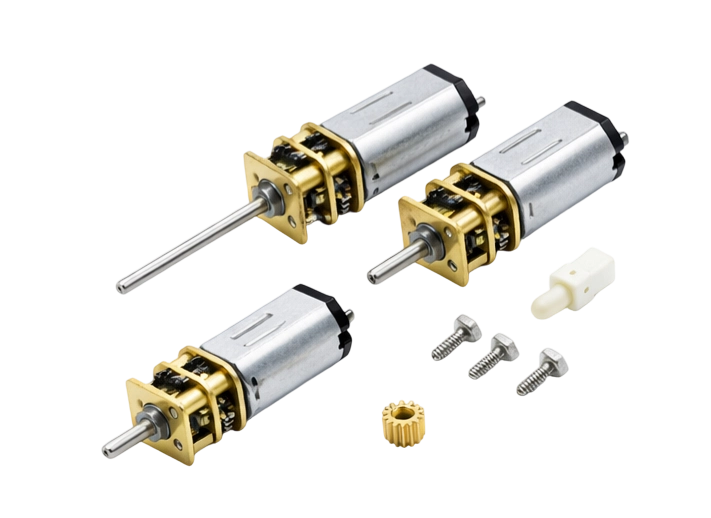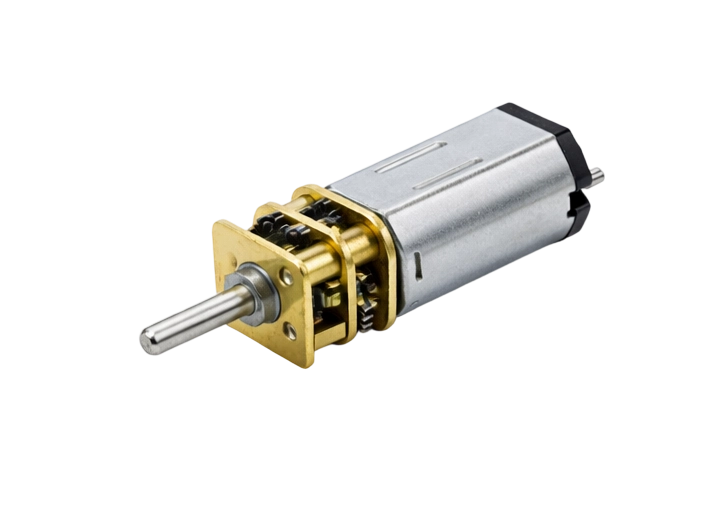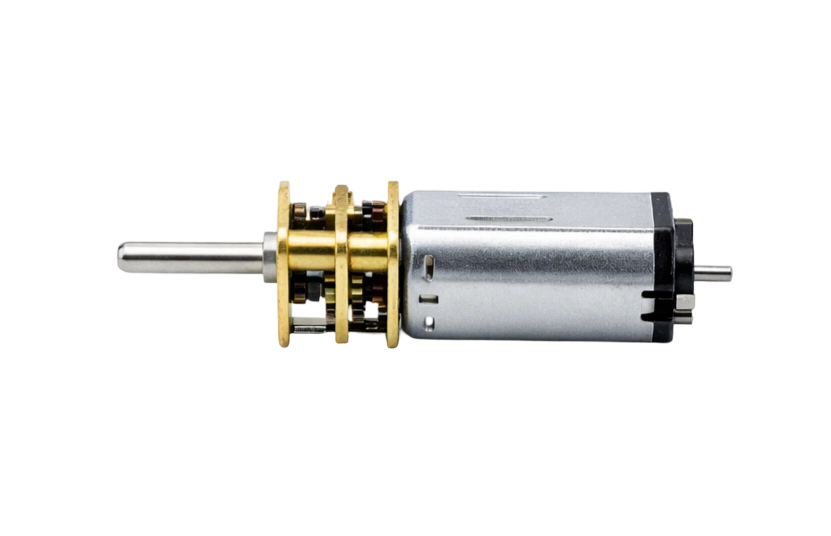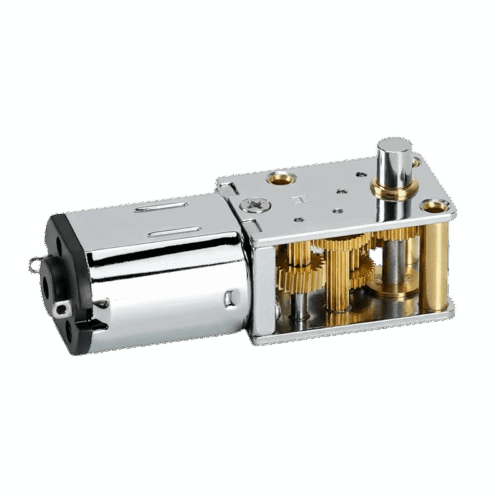
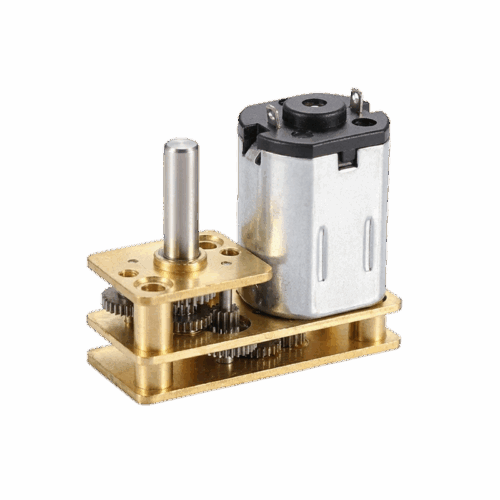
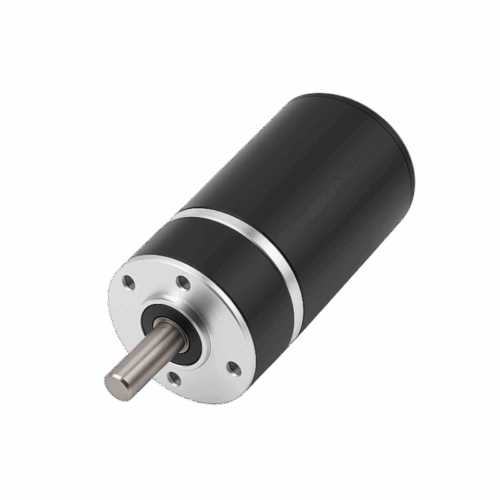
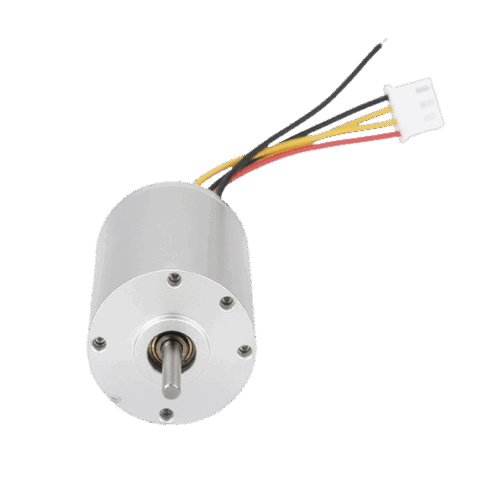
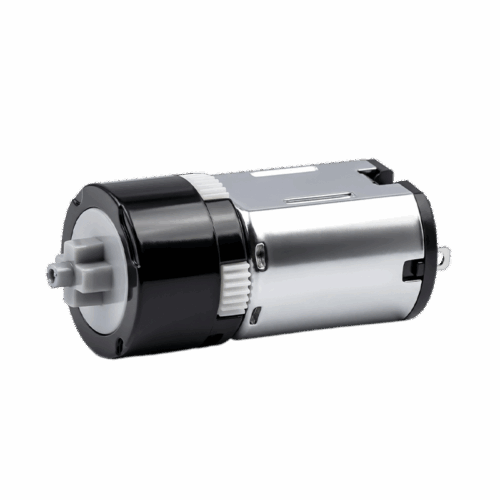
















10mm Diameter Micro Brushed Coreless Motor With Gearbox
This 10mm micro brushed coreless gear motor is built for ultra-compact mechanisms that need gentle, controllable torque at 3V–12V while keeping gearbox length and assembly envelope tightly bounded.